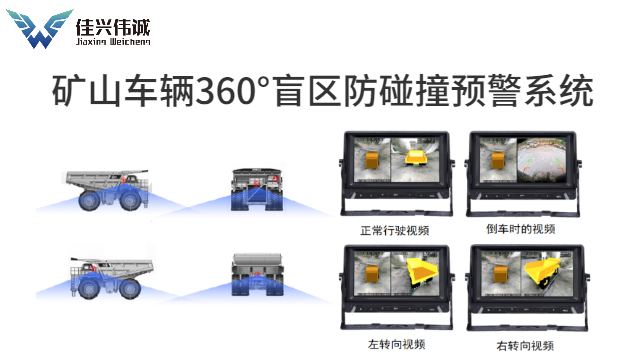
佳興偉誠(chéng) 360 度全景防碰撞預(yù)警系統(tǒng)(又稱(chēng)車(chē)輛環(huán)視系統(tǒng)),工作原理是通過(guò)車(chē)輛前后左右的四枚超廣角鏡頭采集實(shí)時(shí)影像,經(jīng)圖像處理單元處理后,在中控屏幕形成實(shí)時(shí)完整的 360 度全景俯視?shū)B(niǎo)瞰圖。4 個(gè)攝像頭還帶算法,可監(jiān)測(cè)四周行人及車(chē)輛,當(dāng)有靠近時(shí)會(huì)報(bào)警并在中控屏圈出其位置,能大幅減少車(chē)輛周邊盲區(qū)。該系統(tǒng)集成了北斗定位、5G/4G 視頻傳輸、CAN 通訊,以及 BSD(盲區(qū)監(jiān)測(cè)預(yù)警)、DSM(疲勞駕駛 + 行為檢測(cè))、ADSA(車(chē)道偏離)、聲光警報(bào)等傳感器,通過(guò)自有算法結(jié)合影像(被動(dòng)**)與傳感器(主動(dòng)**),實(shí)現(xiàn)特種車(chē) 360 度無(wú)死角主動(dòng)行車(chē)**輔助。其中,ADAS 實(shí)時(shí)監(jiān)控車(chē)輛與車(chē)道相對(duì)位置,偏離時(shí)報(bào)警;BSD 監(jiān)控后視鏡盲區(qū),對(duì)區(qū)域內(nèi)移動(dòng)物體探測(cè)并按等級(jí)報(bào)警,支持多種檢測(cè)類(lèi)型;DSM 通過(guò) AI 視頻分析實(shí)時(shí)監(jiān)控駕駛員行為,不良時(shí)觸發(fā)報(bào)警并上傳相關(guān)視頻圖片。該系統(tǒng)在排除大車(chē)盲區(qū),以及路面狹窄、車(chē)流量大、障礙物多、行人橫穿、司機(jī)疲勞駕駛等場(chǎng)景中,能極大幫助避免危險(xiǎn)。工程車(chē)防碰撞預(yù)警系統(tǒng)借助5G通信技術(shù),實(shí)現(xiàn)了實(shí)時(shí)的數(shù)據(jù)傳輸,讓預(yù)警信息能夠?qū)崟r(shí)傳達(dá)給司機(jī)。寧夏工程車(chē)盲區(qū)防碰撞預(yù)警怎么樣
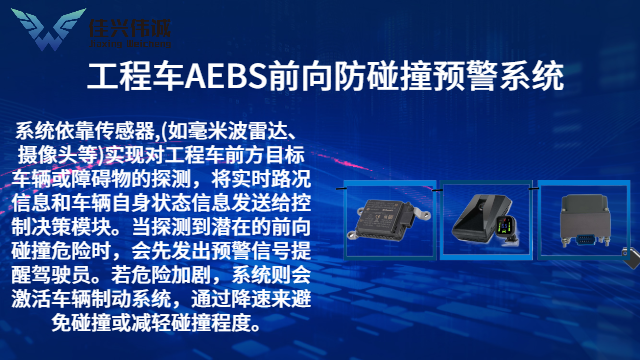
在礦區(qū)復(fù)雜的作業(yè)環(huán)境中,車(chē)輛的**行駛至關(guān)重要。佳興偉誠(chéng)礦區(qū)車(chē)輛前向防碰撞系統(tǒng),作為先進(jìn)的智能**解決方案,為礦區(qū)車(chē)輛的行駛**提供了可靠的保障。佳興偉誠(chéng)礦區(qū)車(chē)輛前向防碰撞系統(tǒng)采用了先進(jìn)的傳感器技術(shù)和智能算法。采用高精度的雷達(dá)傳感器(毫米波雷達(dá)),能夠?qū)崟r(shí)、準(zhǔn)確地監(jiān)測(cè)車(chē)輛前方的路況信息。無(wú)論是近距離的障礙物、快速移動(dòng)的目標(biāo),還是復(fù)雜的地形環(huán)境,系統(tǒng)都能迅速做出反應(yīng)。系統(tǒng)具備強(qiáng)大的預(yù)警功能。當(dāng)檢測(cè)到車(chē)輛前方存在潛在碰撞風(fēng)險(xiǎn)時(shí),會(huì)通過(guò)聲音、燈光等多種方式及時(shí)向駕駛員發(fā)出預(yù)警,提醒駕駛員采取相應(yīng)的措施。同時(shí),系統(tǒng)還能根據(jù)碰撞風(fēng)險(xiǎn)的嚴(yán)重程度,分級(jí)發(fā)出不同級(jí)別的警報(bào),為駕駛員提供清晰的風(fēng)險(xiǎn)提示。寧夏裝載車(chē)盲區(qū)防碰撞預(yù)警定制深圳市佳興偉誠(chéng)科技是生產(chǎn)工程車(chē)、商用車(chē)等大型車(chē)輛防碰撞預(yù)警的廠商。
隨著交通環(huán)境的日益復(fù)雜,車(chē)輛 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)的重要性愈發(fā)凸顯。它為各類(lèi)車(chē)輛提供了**防護(hù),在多個(gè)關(guān)鍵領(lǐng)域發(fā)揮著不可替代的作用。從系統(tǒng)構(gòu)成來(lái)看,感知層是其基礎(chǔ)。以高清攝像頭為例,在車(chē)輛周身合理布局多個(gè)高清攝像頭,它們猶如車(chē)輛的 “眼睛”,敏銳地捕捉周?chē)h(huán)境信息。這些攝像頭的超廣角設(shè)計(jì),確保了對(duì)車(chē)身周?chē)竺娣e盲區(qū)的有效覆蓋。無(wú)論是在白天的強(qiáng)光下,還是夜晚的黑暗環(huán)境中,都能清晰成像。搭配的毫米波雷達(dá)或超聲波雷達(dá),更是為系統(tǒng)在惡劣天氣條件下的正常運(yùn)行提供了保障。在雨霧彌漫時(shí),雷達(dá)能夠憑借其獨(dú)特的測(cè)距原理,準(zhǔn)確感知障礙物的位置,與攝像頭數(shù)據(jù)相互補(bǔ)充,實(shí)現(xiàn)更佳的環(huán)境感知。
工程車(chē)輛盲區(qū)視覺(jué) 360 防碰撞預(yù)警系統(tǒng)是專(zhuān)為挖掘機(jī)、裝載機(jī)等大型工程車(chē)輛設(shè)計(jì)的**輔助系統(tǒng),通過(guò)多維度視覺(jué)感知與智能算法,實(shí)時(shí)監(jiān)測(cè)車(chē)輛周?chē)^(qū)的人員、障礙物等潛在危險(xiǎn),以聲光報(bào)警、圖像顯示等方式提醒駕駛員,減少碰撞事故。?系統(tǒng)由感知層、處理層和預(yù)警層構(gòu)成。感知層含 4-6 個(gè)超廣角高清攝像頭,覆蓋 3-10 米盲區(qū),支持夜視和 IP6K9K 級(jí)防水防塵,還可搭配雷達(dá)應(yīng)對(duì)惡劣天氣;處理層運(yùn)用圖像拼接、目標(biāo)檢測(cè)與追蹤算法及危險(xiǎn)等級(jí)評(píng)估技術(shù);預(yù)警層通過(guò)車(chē)載顯示屏和內(nèi)外聲光裝置實(shí)現(xiàn)預(yù)警。?其技術(shù)優(yōu)勢(shì)在于盲區(qū)覆蓋率超 90%,AI 算法能快速識(shí)別目標(biāo)減少誤報(bào),且響應(yīng)延遲<200ms。典型應(yīng)用場(chǎng)景包括建筑施工場(chǎng)地、礦山、市政工程、港口與物流園區(qū)等。該系統(tǒng)能降低 60%-80% 的盲區(qū)事故率,滿足相關(guān)合規(guī)要求,還能提高作業(yè)效率。針對(duì)不同車(chē)型,佳興偉誠(chéng)科技量身定制車(chē)輛防碰撞方案,適配挖掘機(jī)、裝載機(jī)、渣土車(chē)等各類(lèi)工程車(chē)。

工程車(chē)的 “視線死角” 成因復(fù)雜,或因車(chē)身結(jié)構(gòu)遮擋,如混凝土攪拌車(chē)的旋轉(zhuǎn)筒擋住右側(cè) 3-5 米范圍;或因作業(yè)環(huán)境復(fù)雜,像礦山工地的粉塵會(huì)讓能見(jiàn)度降至 5 米以下。佳興偉誠(chéng)盲區(qū)防碰撞預(yù)警系統(tǒng)憑借先進(jìn)技術(shù),成為解決問(wèn)題的關(guān)鍵。?其搭載的激光雷達(dá)掃描頻率達(dá) 10Hz,可測(cè)量 0.3-10 米內(nèi)障礙物距離,誤差不超過(guò) 5 厘米;配合紅外攝像頭,在夜間無(wú)光環(huán)境中也能清晰成像,識(shí)別行人準(zhǔn)確率達(dá) 95%。數(shù)據(jù)經(jīng)車(chē)載芯片 0.1 秒快速處理后,以彩色標(biāo)注的方式在顯示屏呈現(xiàn),讓原本的 “盲區(qū)” 變得透明可見(jiàn),技術(shù)實(shí)力為**保駕護(hù)航。礦山車(chē)輛前向防碰撞預(yù)警系統(tǒng),實(shí)時(shí)監(jiān)測(cè)車(chē)前障礙物并在存在碰撞風(fēng)險(xiǎn)時(shí)及時(shí)向駕駛員發(fā)出預(yù)警。寧夏商用車(chē)盲區(qū)防碰撞預(yù)警設(shè)計(jì)
礦車(chē)前向防碰撞預(yù)警系統(tǒng)通常由感知層、數(shù)據(jù)處理層、預(yù)警層三部分組成。寧夏工程車(chē)盲區(qū)防碰撞預(yù)警怎么樣
大型車(chē)輛因體型龐大、車(chē)身結(jié)構(gòu)復(fù)雜,存在側(cè)方、后方及車(chē)頭下方盲區(qū),在公路行駛、廠區(qū)作業(yè)或港口轉(zhuǎn)運(yùn)等場(chǎng)景中,易與行人、小型車(chē)輛、作業(yè)設(shè)備發(fā)生碰撞事故。大型車(chē)輛盲區(qū)防碰撞預(yù)警系統(tǒng)應(yīng)運(yùn)而生,該系統(tǒng)由分布在車(chē)身四周的毫米波雷達(dá)、高清攝像頭、超聲波傳感器,駕駛室內(nèi)的多功能顯示屏及聲光報(bào)警裝置組成,可實(shí)時(shí)監(jiān)測(cè)盲區(qū)中的移動(dòng)物體和固定障礙物。系統(tǒng)具備準(zhǔn)確識(shí)別、動(dòng)態(tài)追蹤與多級(jí)預(yù)警功能,能將盲區(qū)目標(biāo)的距離、速度、類(lèi)型等信息在顯示屏上清晰呈現(xiàn)并同步更新;當(dāng)目標(biāo)處于**預(yù)警范圍時(shí),觸發(fā)一級(jí)預(yù)警,對(duì)應(yīng)盲區(qū)方向的車(chē)身警示燈亮起黃色燈光,同時(shí)語(yǔ)音播報(bào) “盲區(qū)有物體,請(qǐng)注意”;若目標(biāo)進(jìn)入危險(xiǎn)范圍,立即啟動(dòng)二級(jí)預(yù)警,警示燈變?yōu)榧t色并高頻閃爍,語(yǔ)音急促提醒 “盲區(qū)危險(xiǎn),立即停車(chē)”,部分系統(tǒng)還會(huì)聯(lián)動(dòng)車(chē)輛制動(dòng)系統(tǒng)施加輕微剎車(chē)阻力,多維度保障大型車(chē)輛作業(yè)與行駛**。寧夏工程車(chē)盲區(qū)防碰撞預(yù)警怎么樣










